Es muy común que hoy en día, los grandes centros de neurorrehabilitación, tengan maquinaria robótica en sus plantillas, y esto lo conocemos a través de las charlas de Jornadas multidisciplinares dedicadas a la neurología, donde suele haber un médico rehabilitador explicando las ventajas de contar con alta tecnología a la hora de recuperar a pacientes con afectación neurológica.
También es muy común, en Máster dedicados al ámbito de la neurología, la misma figura sanitaria suele exponer con gran pasión, las características y distinciones de las interfaz robóticas, combinadas con realidad virtual, con toda la bibliografía correspondiente acerca de los estudios realizados para justificar el enorme gasto que conlleva, la tecnología de tal calibre. Es más, estando presente tanto en las charlas de las Jornadas como en el mismo Máster, el discurso de que la tecnología sustituya a la mano de obra humana, es un paso tanto de la evolución como de la revolución, tal y como se argumenta desde la perspectiva de la agricultura o de la misma industria, suele repetirse, aunque cada vez con menor ahínco.
Ahora bien, ¿cuáles son las ventajas y cuáles las desventajas de la utilización de la robótica en la neurorrehabilitación? Intentaremos tomar una perspectiva objetiva, aunque algo sesgada, ya que será combinada con opinión personal. Vamos a ello.
Ventajas:
- Tal y como muestra la mayoría de estudios, así como la práctica clínica en pacientes con afectación neurológica demuestra, la intervención terapéutica temprana (3) en caso de daño cerebral, es más que positiva, una vez estabilizado el estado vital del paciente. Es por ello, que es interesante que los afectados cuenten con un sistema de rehabilitación precoz, donde la inclusión del robot a las terapias, dé una visión muy objetiva e inicie un tratamiento de movilización inmediato, con la ayuda de la desgravación mediante la sujeción de un arnés, junto con una cinta rodante, que ayudará a la persona de manera indiscutible. Ahora bien, ¿la persona entiende para qué sirve? ¿La persona tiene miedo? ¿A la persona le gusta la tecnología? ¿La persona está preparada para que un robot la mueva? Hay que planteárselo.
- El robot genera una repetición exacta de los movimientos a rehabilitar, lo que proporciona un feedback exacto a cada paso. Y es que la marcha perfecta puede ser generada, y el desarrollo del movimiento del robot guía a la perfección el patrón de marcha a rehabilitar. Dicen que la neurorrehabilitación se basa en la repetición y la intensidad (4) de ésta, y cuanto más se repite, más se aprende. La clave según muchos, es repetir sin repetir, es decir, repetir una acción, cambiando constantemente las condiciones tanto del entorno como del mismo movimiento. Ahora bien, ¿Y la motivacción? ¿La relevancia? ¿Le gusta lo que hace? ¿Entiende el contexto del robot como paciente afásico?… Hay que planteárselo.
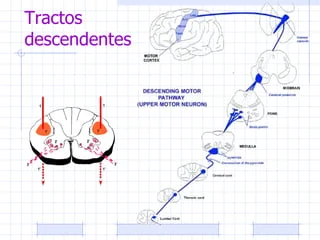
- Esa repetición exacta da un feedback preciso y concreto, lo que puede moldear tal y como queremos tanto las estructuras periféricas como la organización del Sistema Nervioso Central (5) con la tan conocida neuroplasticidad cerebral, reorganizando los patrones sensitivo-motores perdidos tras la lesión. Todo ello realizando una perfecta marcha generada y continuada por el robot, con los parámetros que ellos se incluyan en un estudio individualizado de la marcha del paciente. Ahora bien, recordemos que la neuroplasticidad dura todo el día, y a ello me refiero que la hora o hora y media que esté la persona en rehabilitación, es un porcentaje del tiempo que dura todo un día, 1/24, y la neuroplasticidad es así de caprichosa, siempre estamos aprendiendo aunque no se quiera, tanto para bien como para mal. Lo que quiero decir es que has estado 1 hora perfecta realizando una marcha, a ver cómo la realizas el resto del día, y cómo es tu entorno (ambiental y de relaciones sociales) y qué tipo de actividades desarrollas en tu día a día…
- Muchos robots desarrollan su ejercicio activo-asistido mediante feedback visual, como realidad virtual (más coste económico), videojuegos o señales luminosas o acústicas, dando una información exacta de cómo está la marcha o el equilibrio estático, generando informes exactos. Hay que replantear de nuevo si los pacientes están preparados para ello, si les gusta o simplemente lo entienden. Por tanto, hay una selección del tipo de paciente, no todos son aptos para recibir éste tratamiento.
- La monitorización exacta del progreso de un paciente, donde es más que interesante tanto en la clínica, como por supuesto en la investigación, con resultados objetivos y precisos. Indiscutible.
- El humano se cansa rehabilitando, el robot no (100 repeticiones vs. 1000 repeticiones). El humano no tiene la precisión en la movilización de las extremidades inferiores durante la marcha, el robot si. El robot no se lesiona (bueno, se estropea y requiere mantenimiento), el humano si. El humano adopta posiciones no ergonómicas, el robot no. El humano tiene vacaciones, el robot no. El humano cobra un sueldo, el robot no. Efectivamente, los humanos no son máquinas, los robots si.
- La evidencia demuestra que los pacientes, con adición de la terapia robótica a la convencional, mejoran tanto en la cadencia como en la velocidad de la marcha. (6) aunque no especifican si se mantienen en el tiempo. Y otro estudio sobre el Lokomat (7,8) acerca de la superioridad en relación a la fisioterapia convencional (que habría que analizar qué es la fisioterapia convencional, lo haremos en otra entrada que ya está en borradores) relacionada con la marcha y el test del 6 min. Walk.
Desventajas:
- En investigación, muchos intereses de por medio para poder justificar el uso de éste tipo de robótica, lo que ello implica varios temas candentes, como el conflicto de interés en los estudios de las grandes empresas para vender el producto, el pequeño tamaño muestral de éstos (aún no mostrada la eficiencia y eficacia, ya está el producto a la calle), la inexistencia en algunos de casos controles, la falta de randomización, o la falta de evaluadores cegados. Por último, el ámbito de la aplicación de la robótica siempre es clínica, ausentándose en otros contextos (como domicilario o comunitario) donde precisamente debe traducirse la recuperación, en el día a día de la persona afecta.
- Alto coste del producto, y es por ello que sólo tienen acceso los grandes centros de neurorrehabilitación. Por tanto, la relación coste-eficiencia-efectividad, quizás no se vea plasmada en los estudios de investigación, donde podemos discutir a ciencia cierta, el aporte del experto terapeuta vs. el experto robot, en éste tipo de relación. No es una tecnología precisamente accesible.
- Los gustos por los robots, tecnología, videojuegos, entre otros, y su impacto emocional, contextual, biopsicosocial que puede tener en el paciente. Repetimos que no todos están preparados para recibir éste tipo de tratamiento, mientras que en las clínicas, precisamente no podemos ir seleccionando el tipo de paciente que queremos. El humano tiene que realizar una intervención terapéutica, sin condiciones, y punto.
- La realización de una marcha automática generada por un robot es buena, ahora bien, siempre en las mismas condiciones contextuales. ¿Acaso siempre andamos en línea recta? Y ¿sobre un tapiz rodante? Si la neurorrehabilitación consiste en repetir sin repetir (cosa que no sé si estoy de acuerdo, esto da para otra entrada), ¿acaso el robot puede plantear distintas situaciones ambientales? Como por ejemplo, todas las condiciones aleatorias que se pueden dar en la calle. Y es más, tras la rehabilitación con el robot, ¿esto se traduce que en tu vida diaria desarrolles ese tipo de marcha que has entrenado? O lo que viene siendo, ¿existe una transferencia de conocimiento y condiciones de desarrollo motor en tu día a día, como viene siendo andar hacia la panadería para comprar el pan, o andar por el paso de cebra y que cambie el semáforo a rojo… ?
- El trato. No es de extrañar que un médico que trata bien a sus pacientes tenga mayor repercusión terapéutica que uno que los ignore o simplemente preste menor atención. Y es que la rehabilitación neurológica, como todos sabemos (aunque a veces a los fisioterapeutas nos cueste algo más) debe realizarse desde una perspectiva multidisciplinar, ya así la evidencia lo demuestra, y de eso el robot no entiende, porque no sabe si un paciente tiene un problema de motivación, miedo, hemianopsia, o perceptivo. El robot sabe de parámetros, y los ejecuta, y a veces eso no llega a ser terapéutico.
Fijaros que he planteado más ventajas que desventajas, pero dichas ventajas están reconsideradas, porque no son para nada absolutas, y se pueden debatir. Pero para eso lo dejamos en los comentarios, que vuestro feedback es más que necesario, para evitar precisamente mi sesgo. Saludos y buen debate.
Bibliografía:
(1) Stein J. Robotics in rehabilitation: technology as destiny. Am J Phys Med Rehabil 2012 Nov;91(11 Suppl 3):S199-203.
(2) Veerbeek JM, Koolstra M, Ket JC, van Wegen EE, Kwakkel G. Effects of augmented exercise therapy on outcome of gait and gait-related activities in the first 6 months after stroke: a meta-analysis. Stroke 2011 Nov;42(11):3311-3315.
(3) DeJong G, Horn SD, Conroy B, Nichols D, Healton EB. Opening the black box of post-stroke rehabilitation: stroke rehabilitation patients, processes, and outcomes. Arch Phys Med Rehabil 2005 Dec;86(12 Suppl 2):S1-S7.
(4) Eng JJ, Tang PF. Gait training strategies to optimize walking ability in people with stroke: a synthesis of the evidence. Expert Rev Neurother 2007 Oct;7(10):1417-1436.
(5)Esquenazi A, Packel A. Robotic-assisted gait training and restoration. Am J Phys Med Rehabil 2012 Nov;91(11 Suppl 3):S217-27; quiz S228-31.
(6) Tefertiller C, Pharo B, Evans N, Winchester P. Efficacy of rehabilitation robotics for walking training in neurological disorders: a review. J Rehabil Res Dev 2011;48(4):387-416.
(7)Mayr A, Kofler M, Quirbach E, Matzak H, Frohlich K, Saltuari L. Prospective, blinded, randomized crossover study of gait rehabilitation in stroke patients using the Lokomat gait orthosis. Neurorehabil Neural Repair 2007 Jul-Aug;21(4):307-314.
(8) Hidler J, Nichols D, Pelliccio M, Brady K, Campbell DD, Kahn JH, et al. Multicenter randomized clinical trial evaluating the effectiveness of the Lokomat in subacute stroke. Neurorehabil Neural Repair 2009 Jan;23(1):5-13.